TP GLPI
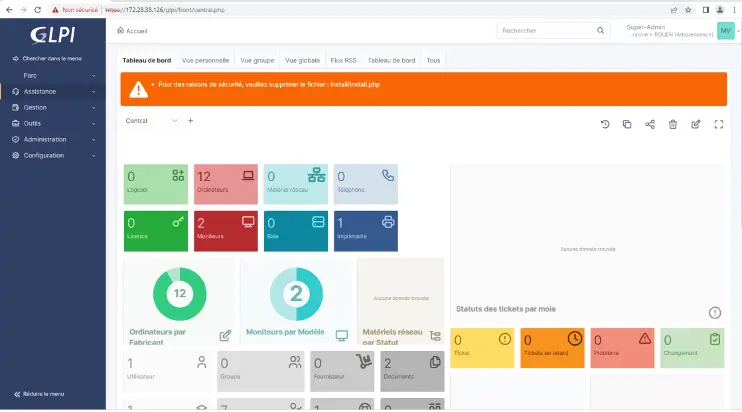
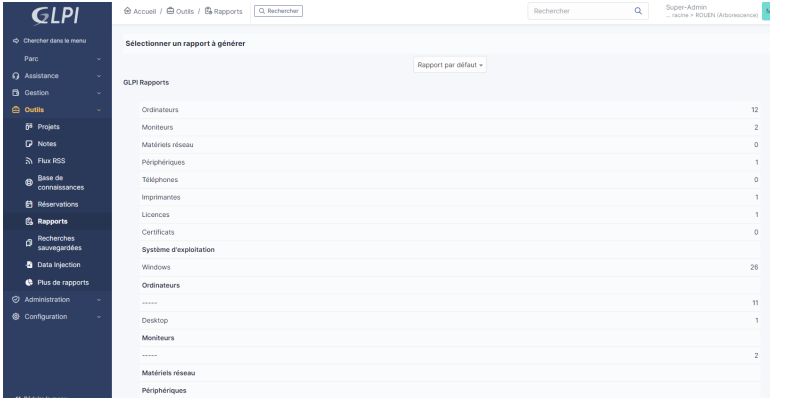
Une fois connecté sur GLPI on arrive sur cette interface. On voit tous les appareils du réseau avec leurs lieu noms et autres spécificités
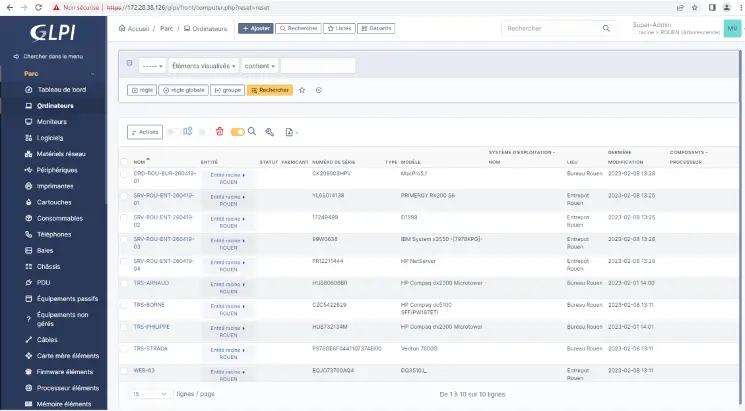
On doit renommer chaque poste avec une nomenclature bien particulière et propre à l’appareil, son lieu, sa date d’achat et d’autres paramètres.
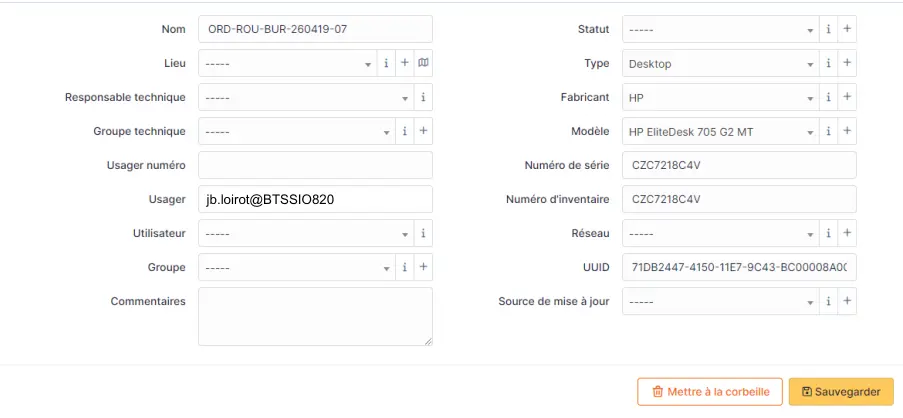
Après l’installation de FusionInventory on retrouve le poste sur lequel on se trouve dans GLPI
On retrouve toutes les informations de l’utilisateur au model de la machine en passant par
d’autres informations utiles
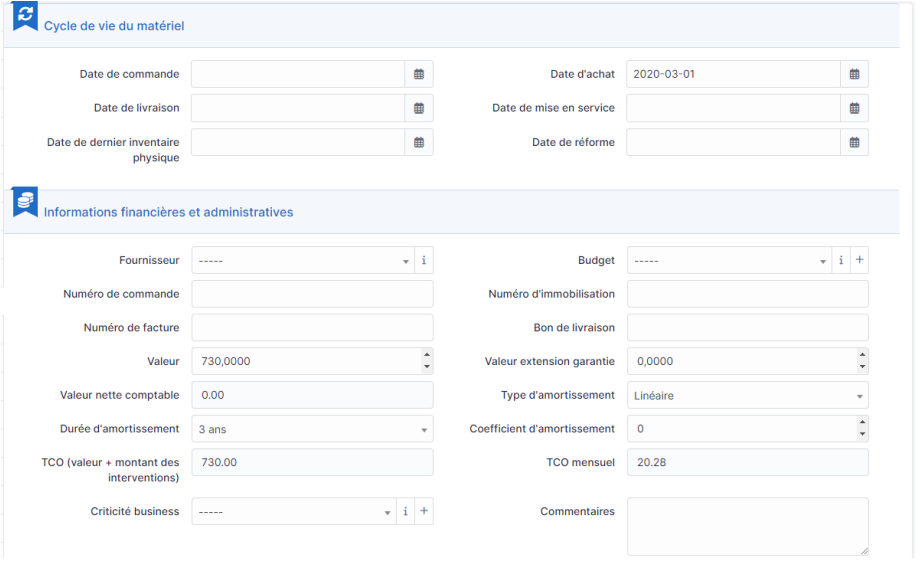
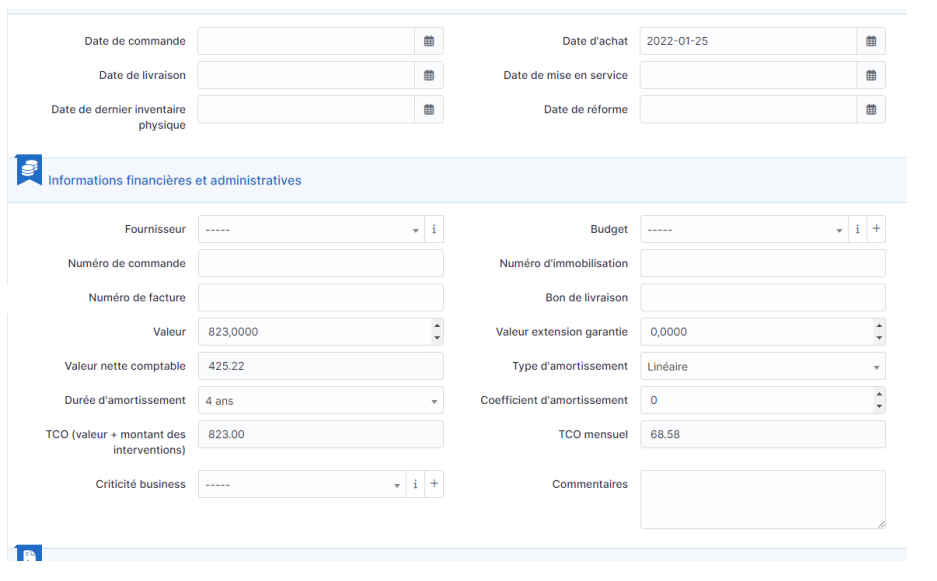
On peut aussi renseigner la valeur du matériel sa durée d’amortissement ou encore son type
d’amortissement
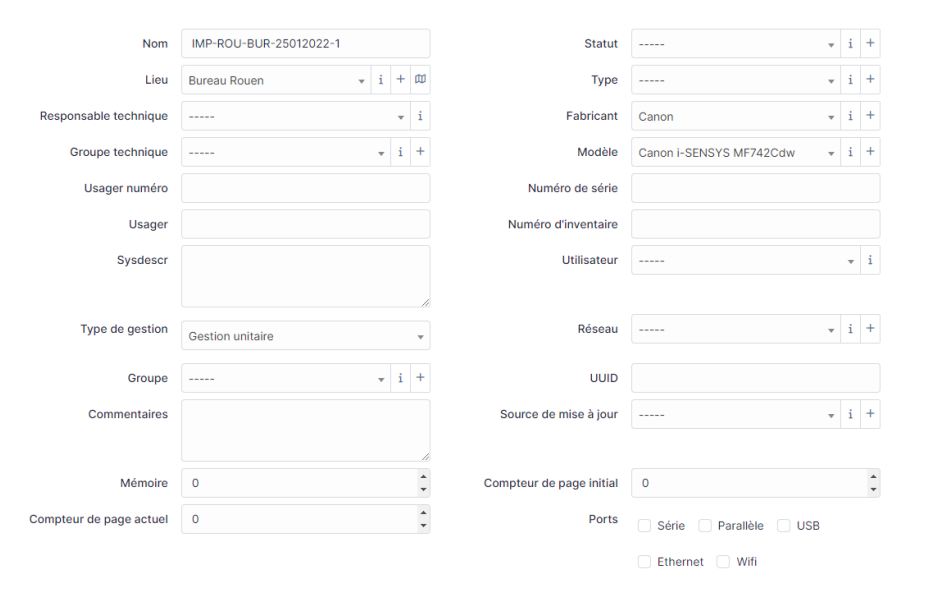
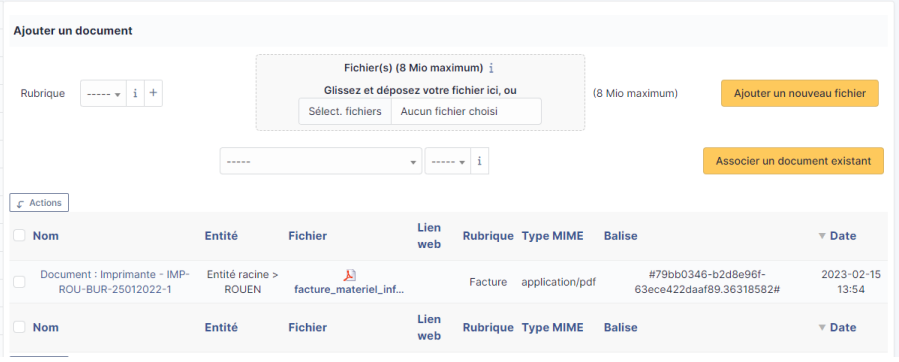
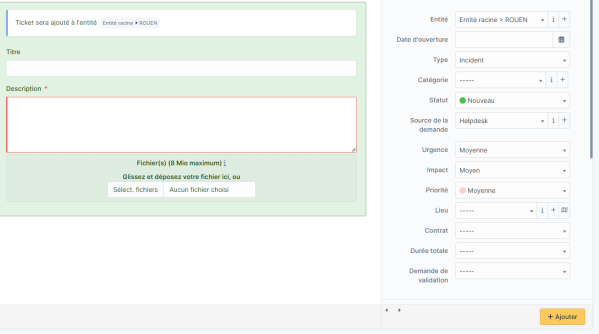
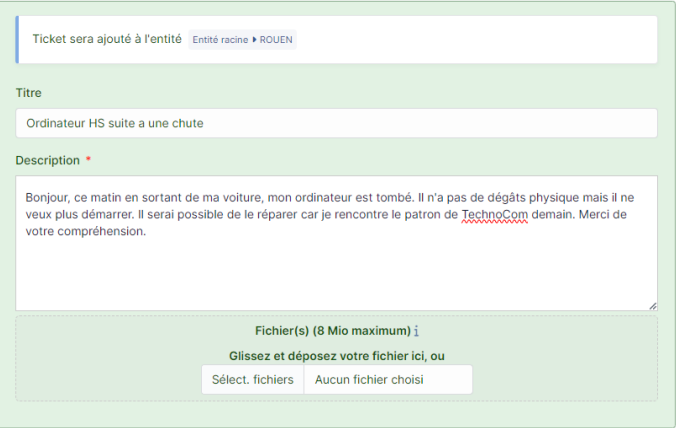
L’entreprise ayant acheté une nouvelle imprimante, le SI nous demande de la rajouter à GLPI et d’y associer la facture.
Une fois complété voici notre nouvelle imprimante (photo 1)
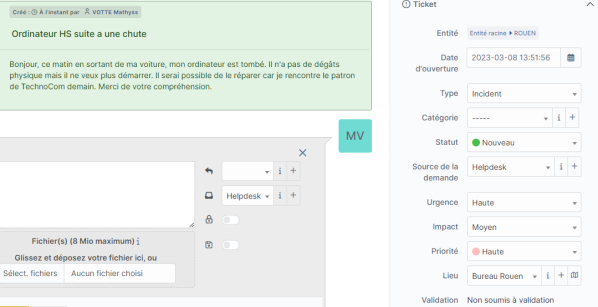
On ajoute toutes les valeurs et la durée d’amortissement (photo 2)
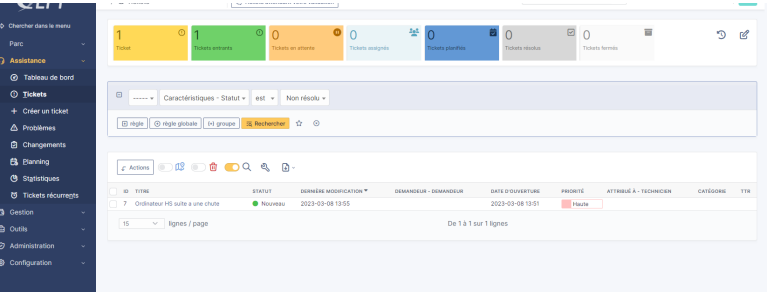
Maintenant la facture est bien associé à l’imprimante qui a rejoins le reste de nos appareils
enregistré dans GLPI
Maintenant il faut ajouter les licences des logiciels de l’entreprise afin de pouvoir les utiliser sur les postes
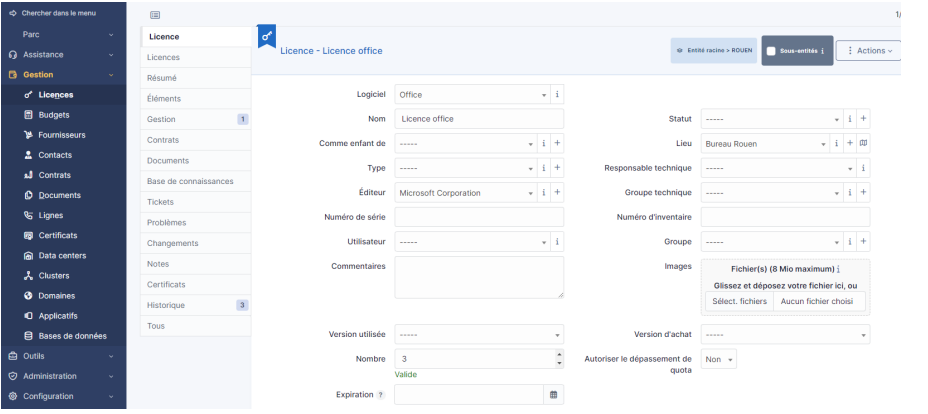
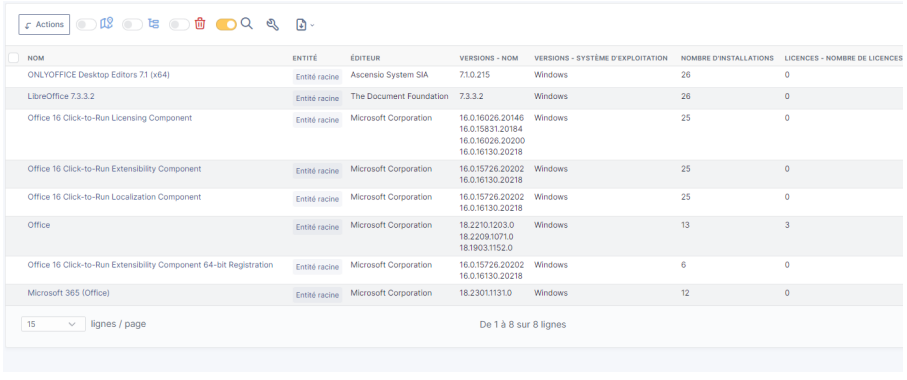
On peut maintenant comparer les licences acheté et celles installé sur les postes
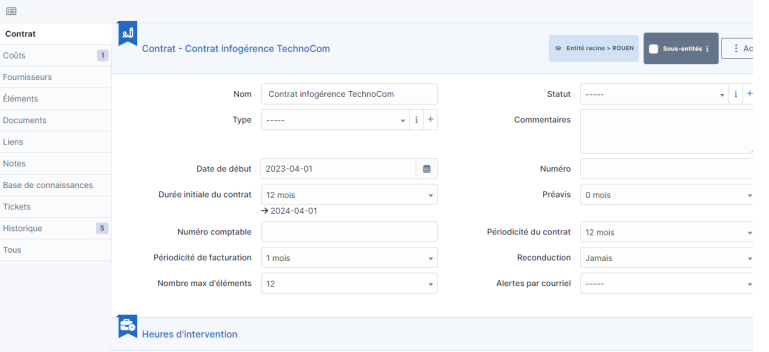
On ajoute maintenant le contrat de technocom
-Proxmox
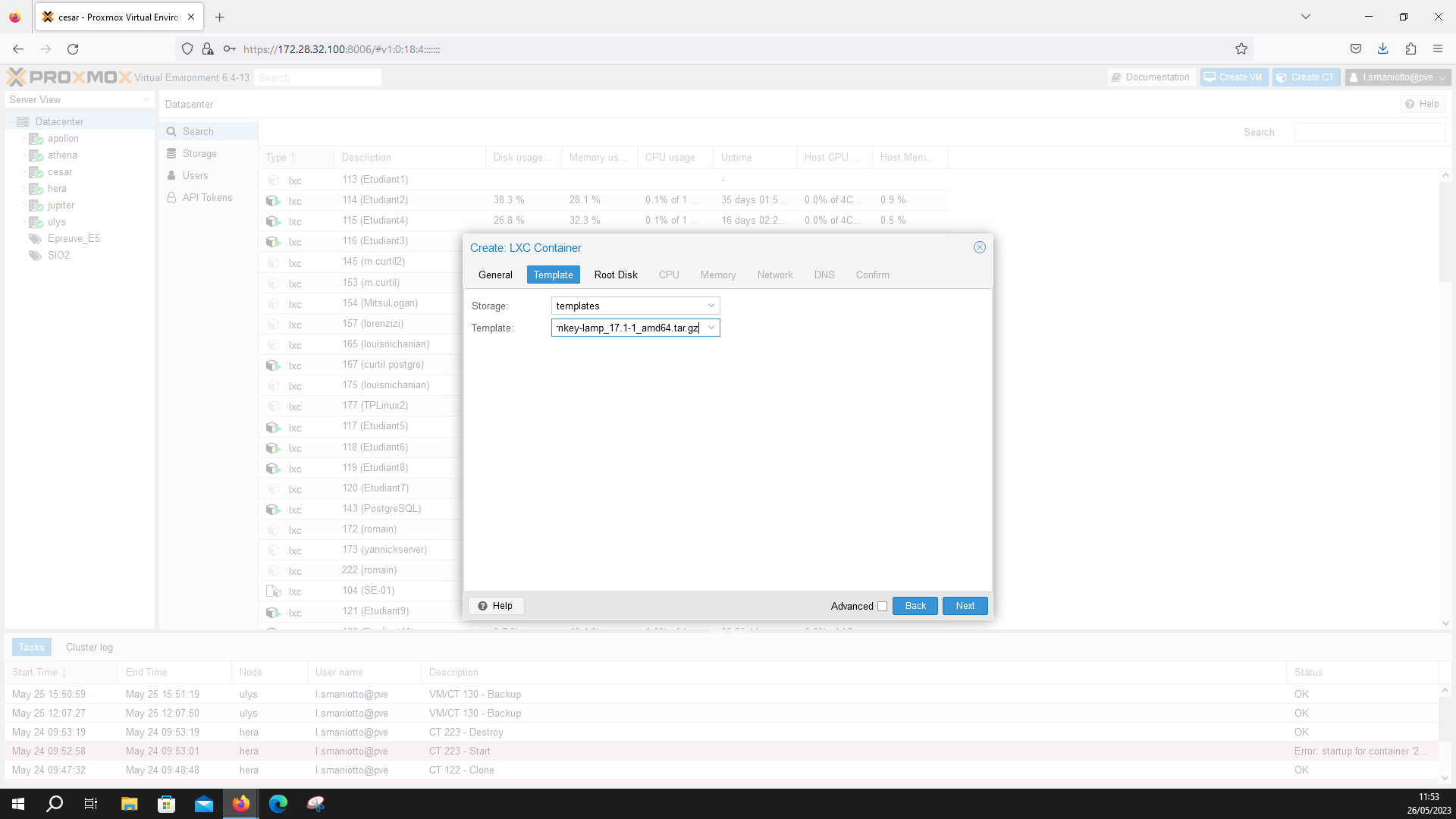
TP Proxmox réalisé sur une version de Proxmox installée par nos enseignants.
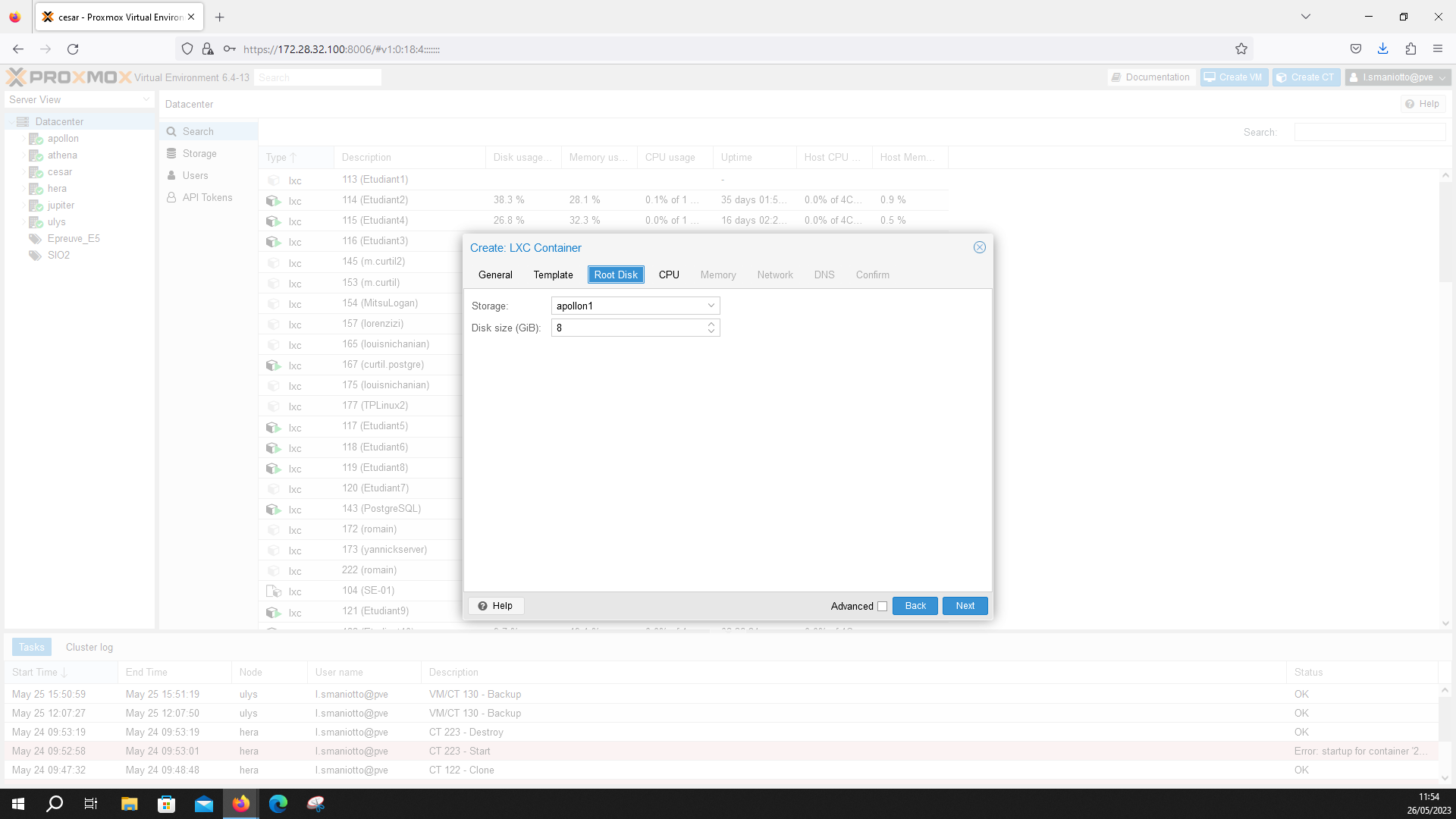
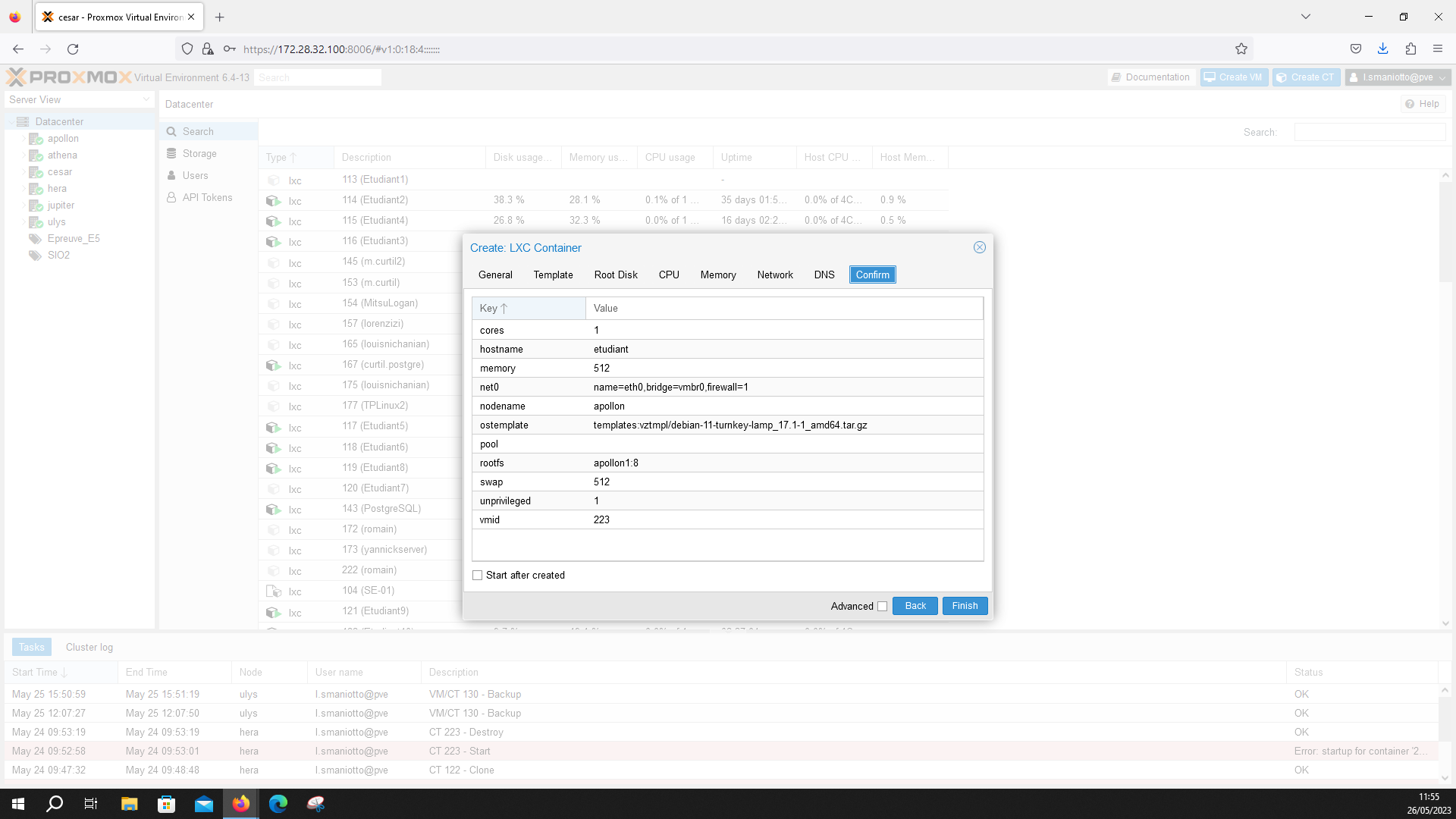
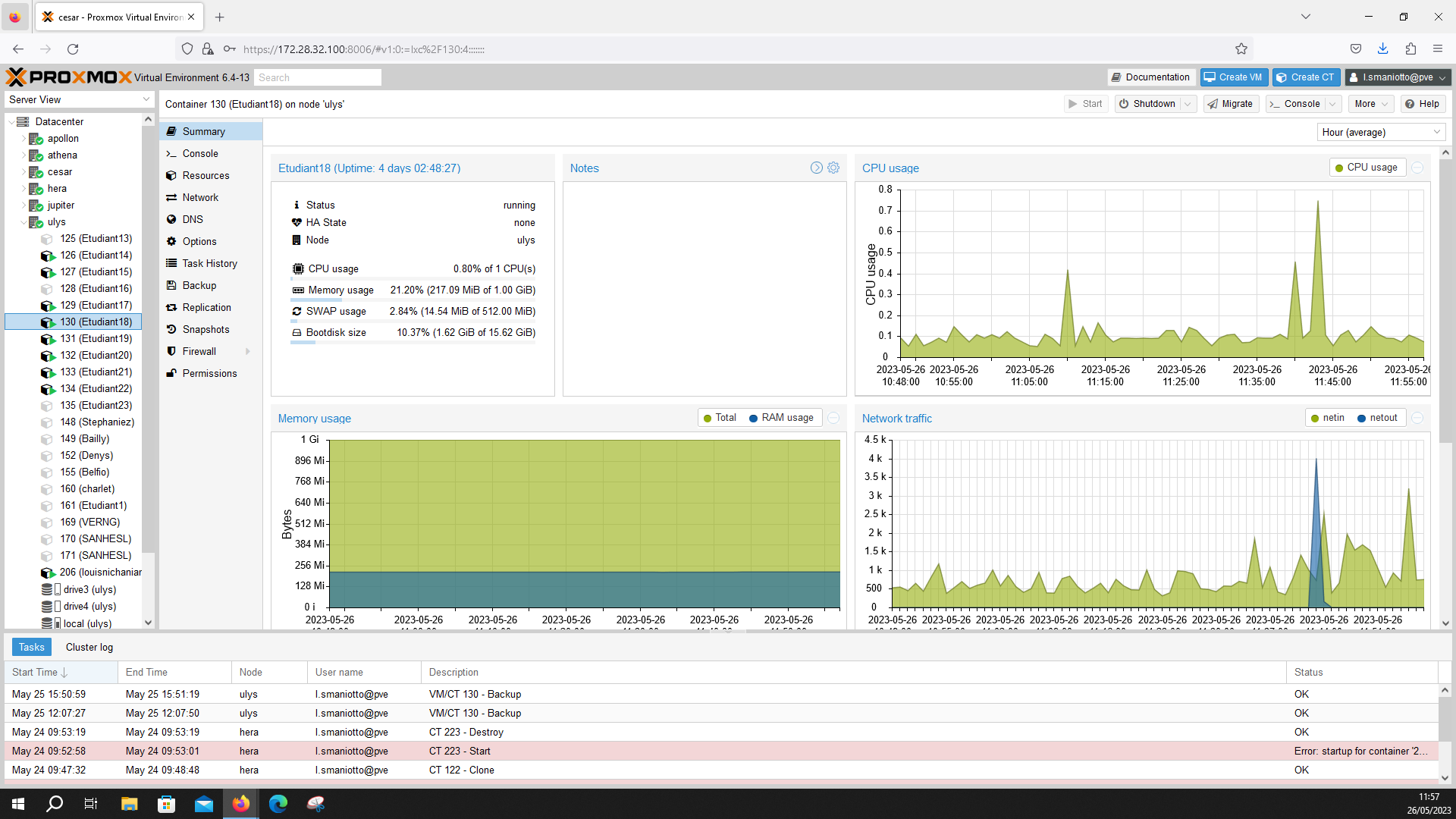
Lors de ce tp, nous avions dû créer un contener avec certaines spécificité.
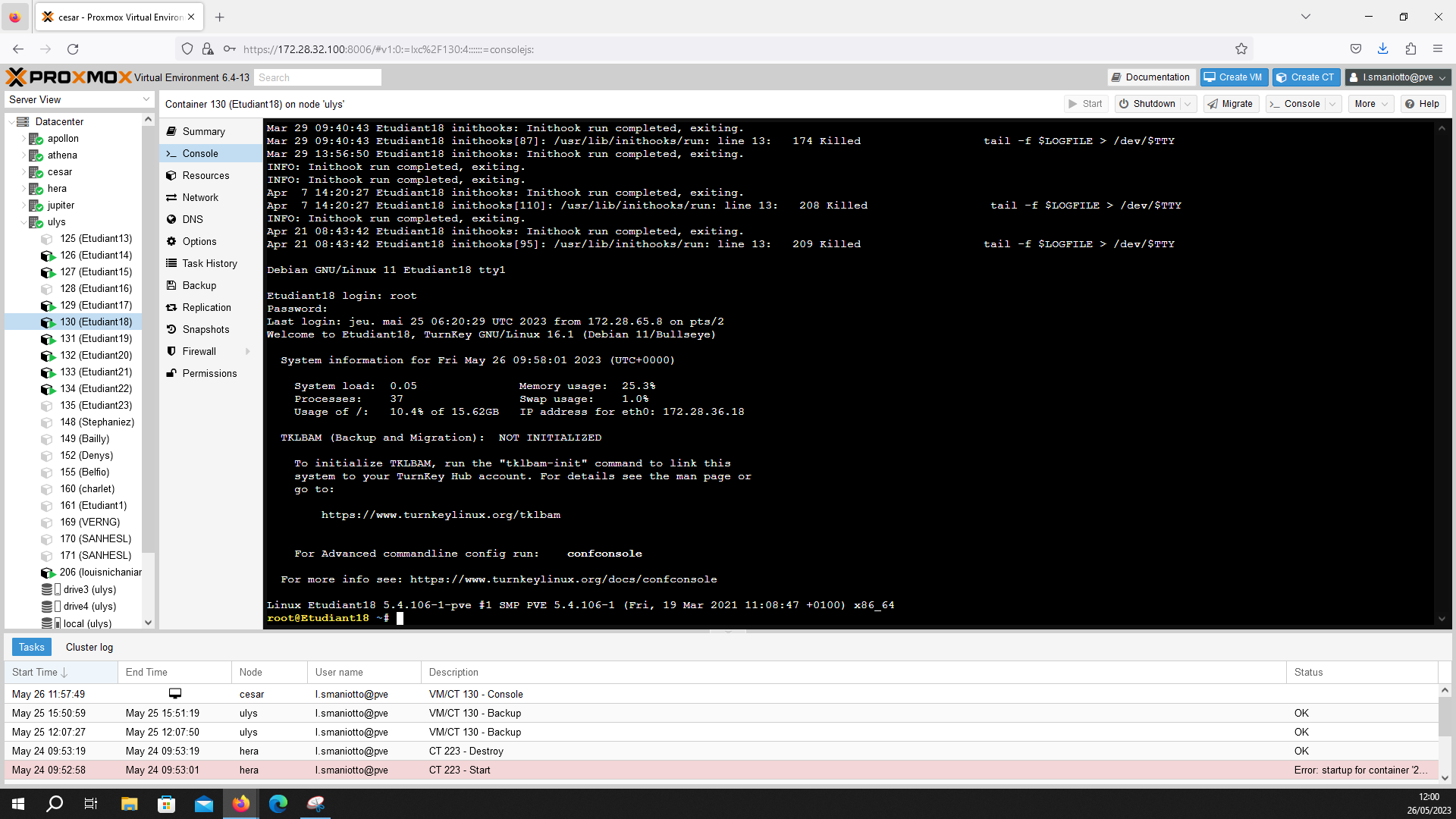
Une fois ceci fait, lors du premier démarrage dont j'ai oublié les screens, il fallait faire les premières configuration dont la possibilité de changer l'adresse ip
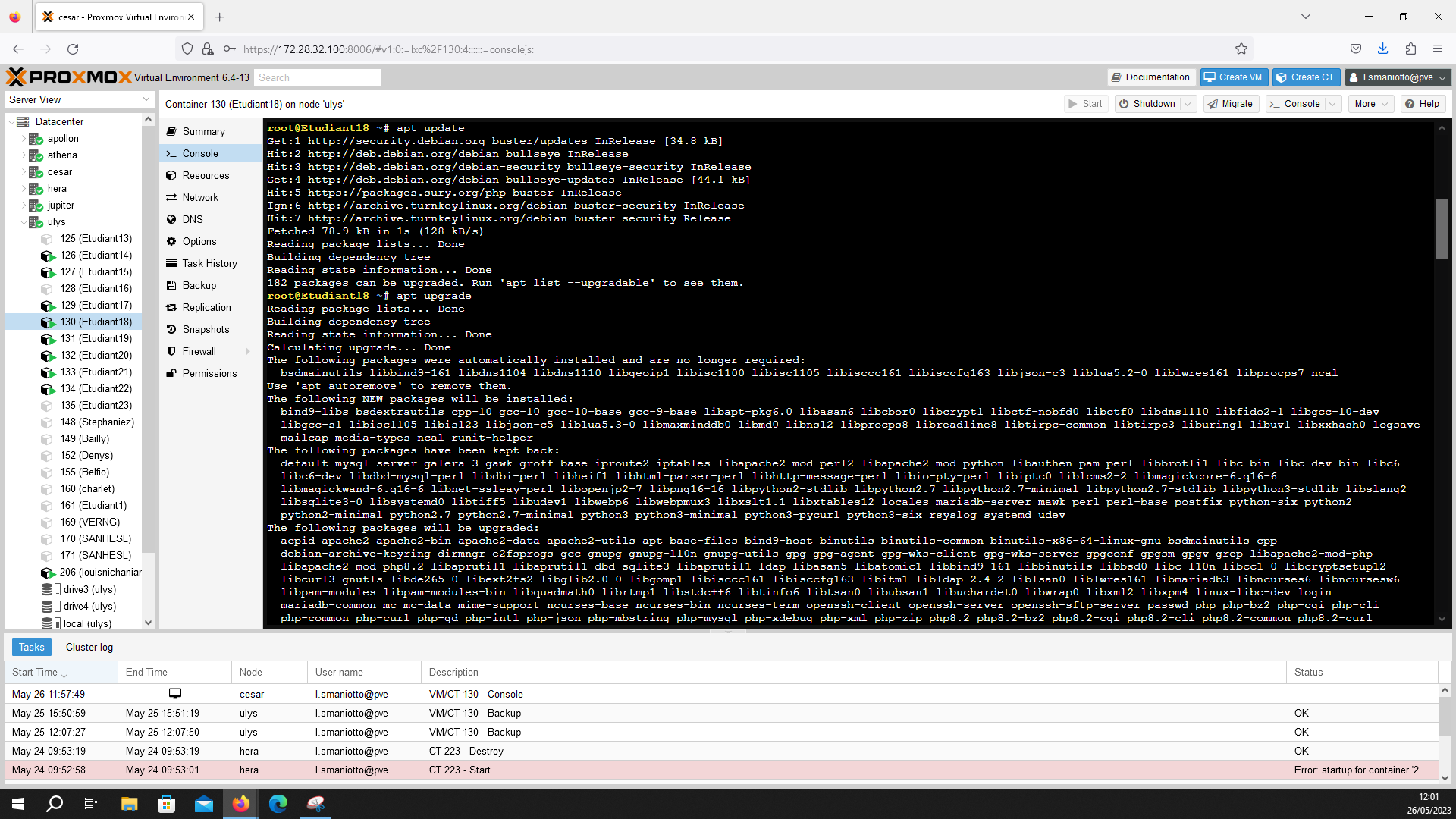
une fois ceci terminé, il faut faire un apt update && upgrade pour finaliser l'installer avec les mises à jour
et vérifier avec systemctl status mysql / apache2 que ces fonctionnalités sont fonctionnelle



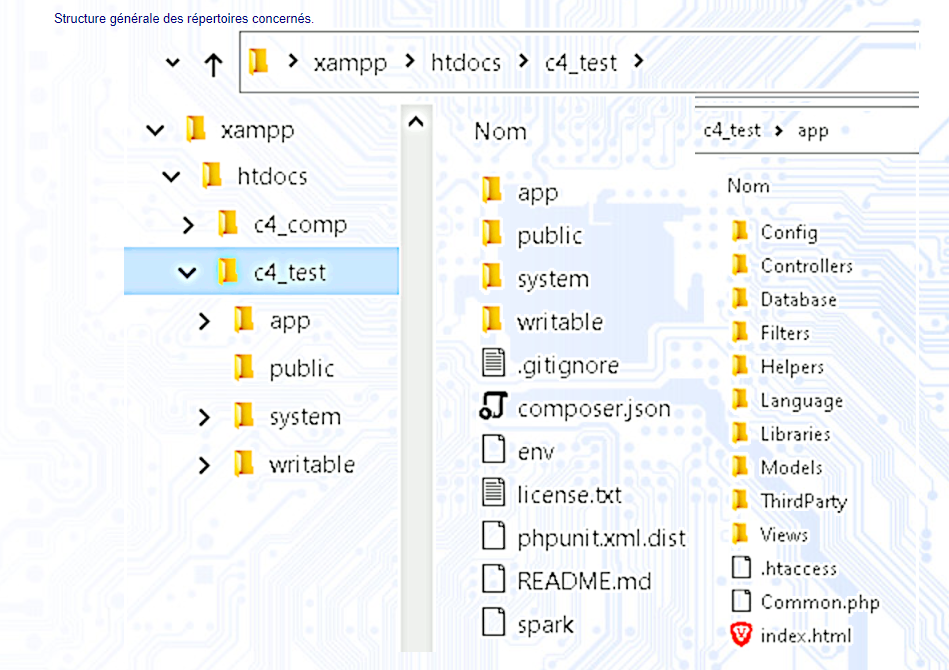
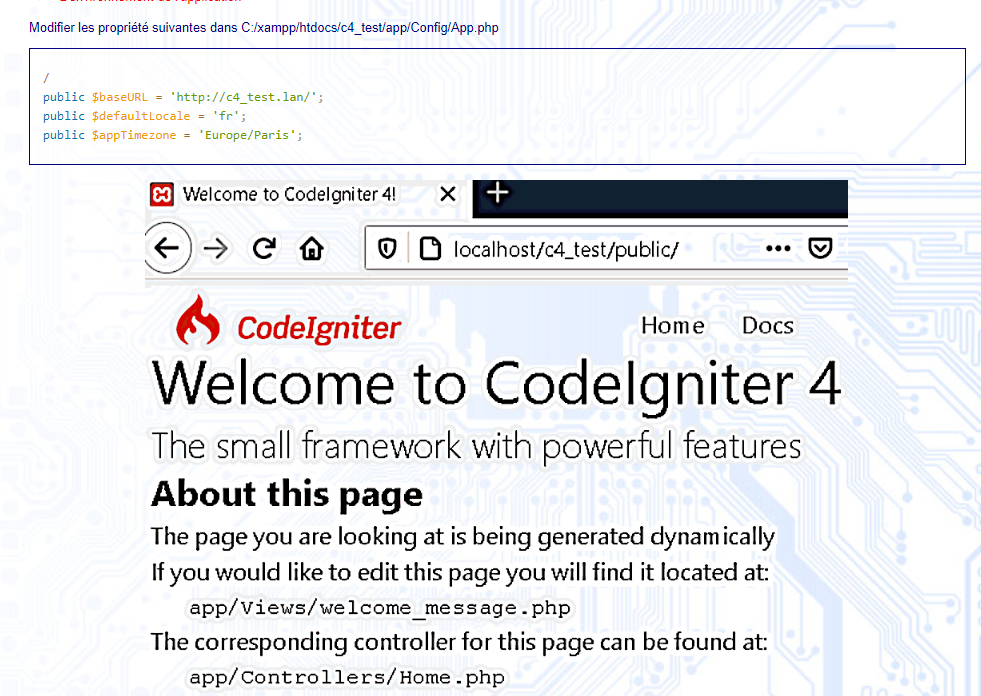
-CodeIgniter
Lors de ce tp nous avions apprit à installé et utilisé CodeIgniter et à faire nos premières pages pour apprendre les bases des routes et des différences pour les requêtes.



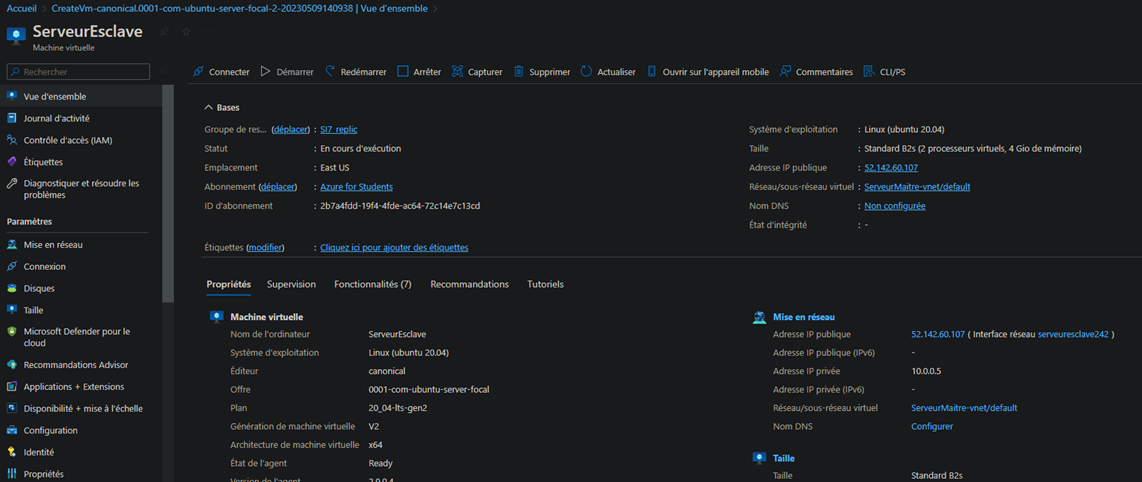
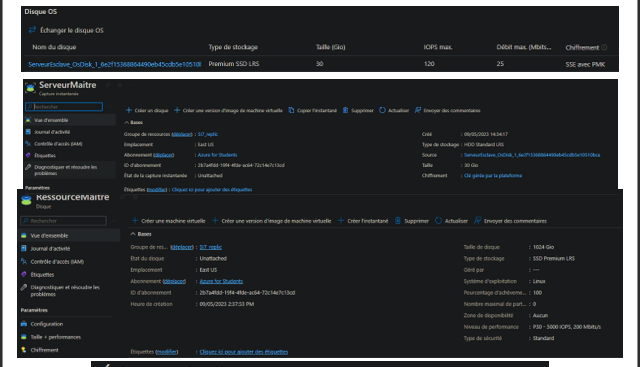
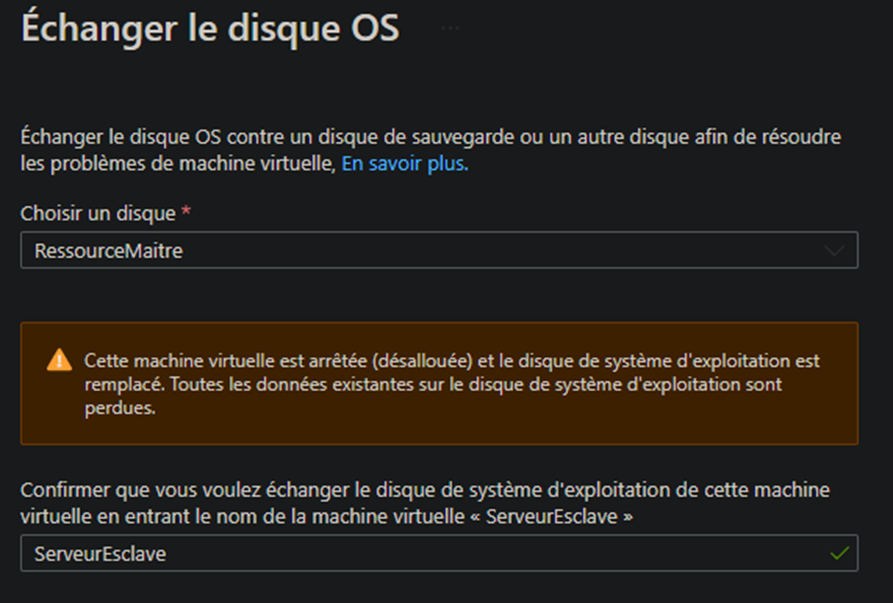
-Azure
Lors de ce tp nous avions apprit à faire de la réplication de donnée (le RAID) sur des machines virtuelles (relation maitre esclave) sur Azure
Après les installations fait un apt get update && upgrade
décommenter les sources « partner » dans le fichier /etc/apt/sources.list.
Et ouvrir les ports dans /etc/mysql/mariadb.conf.d/50-server.cnf
Et le remplacer par bind-address=0.0.0.0
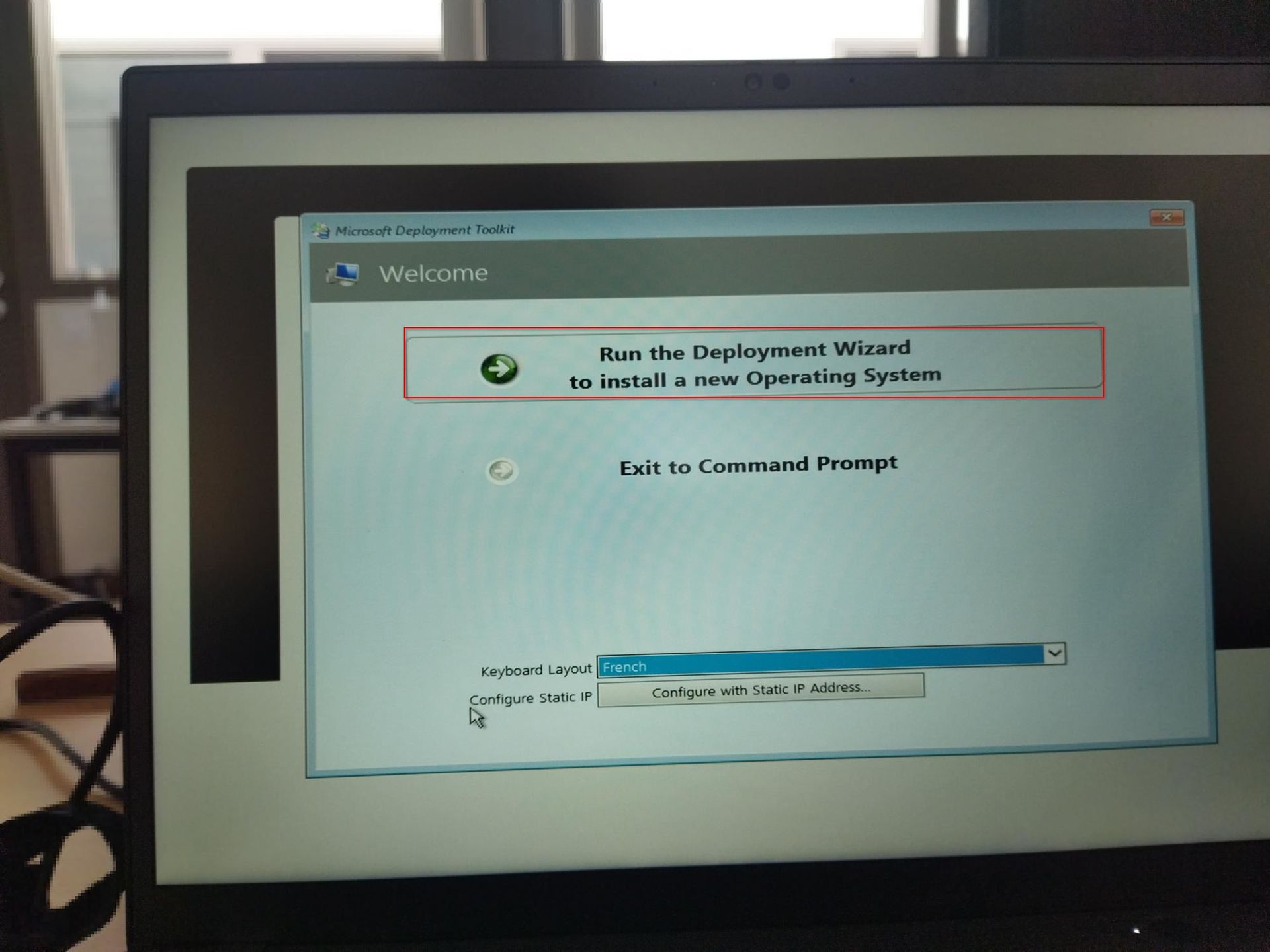
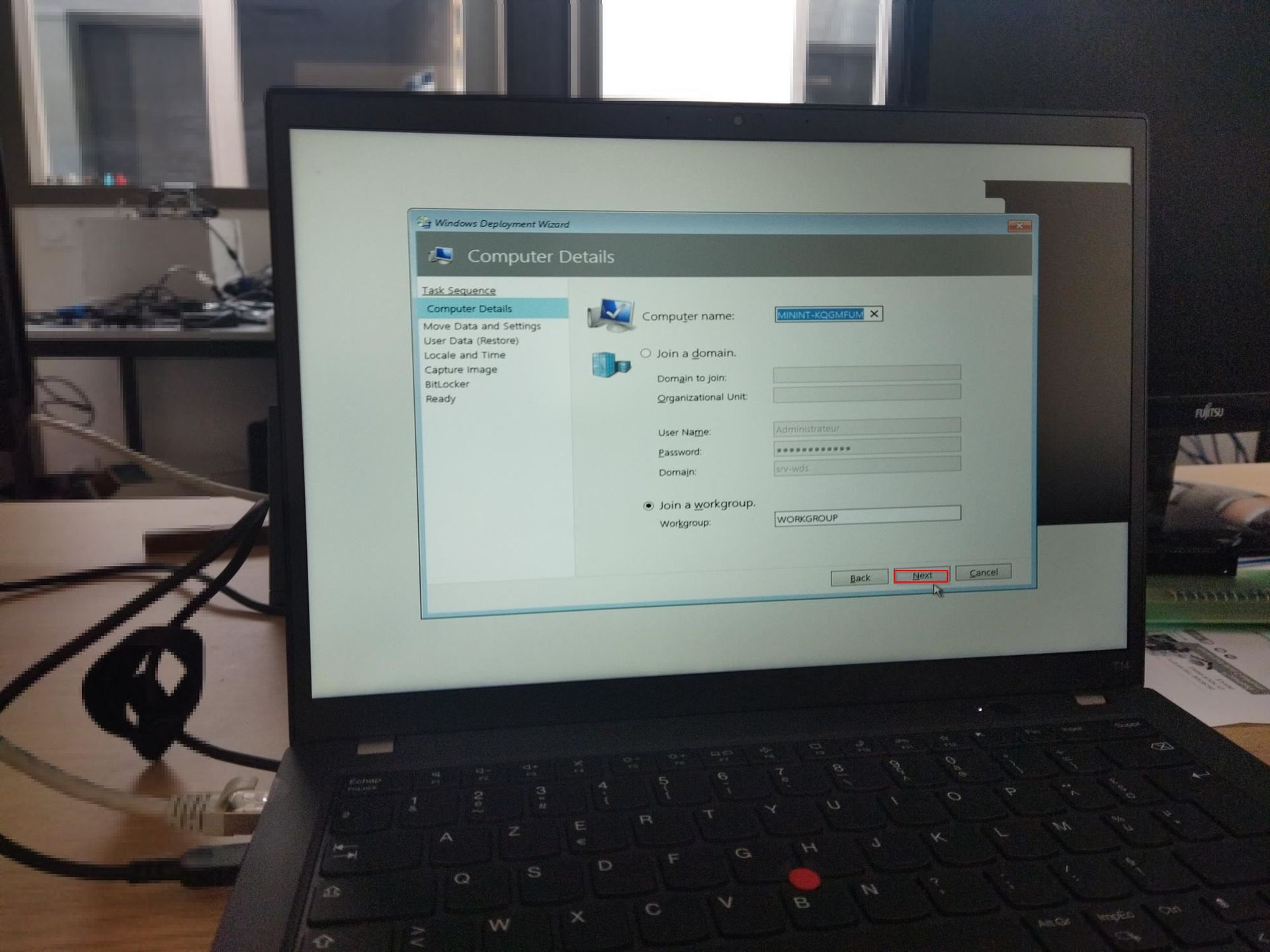
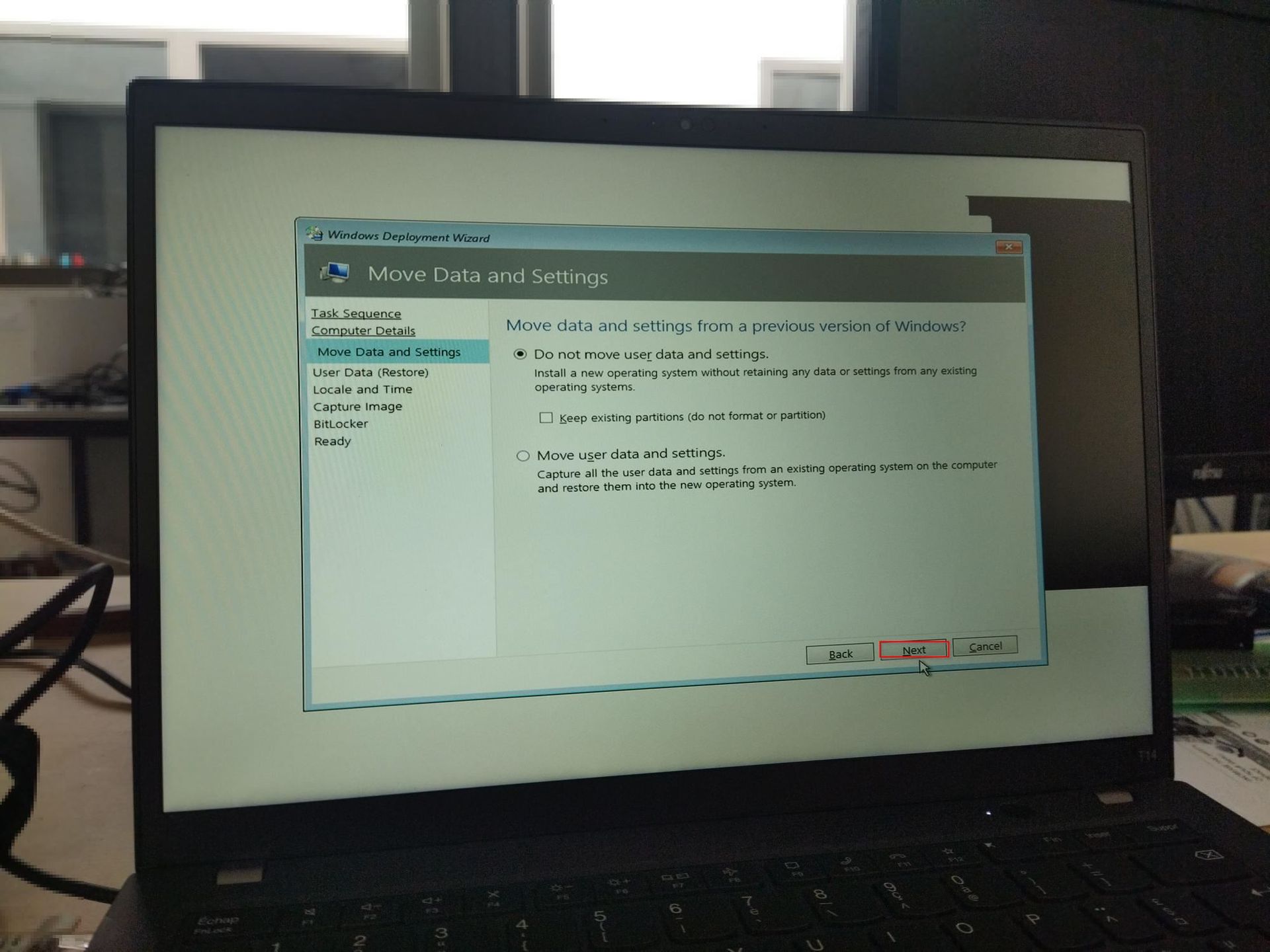
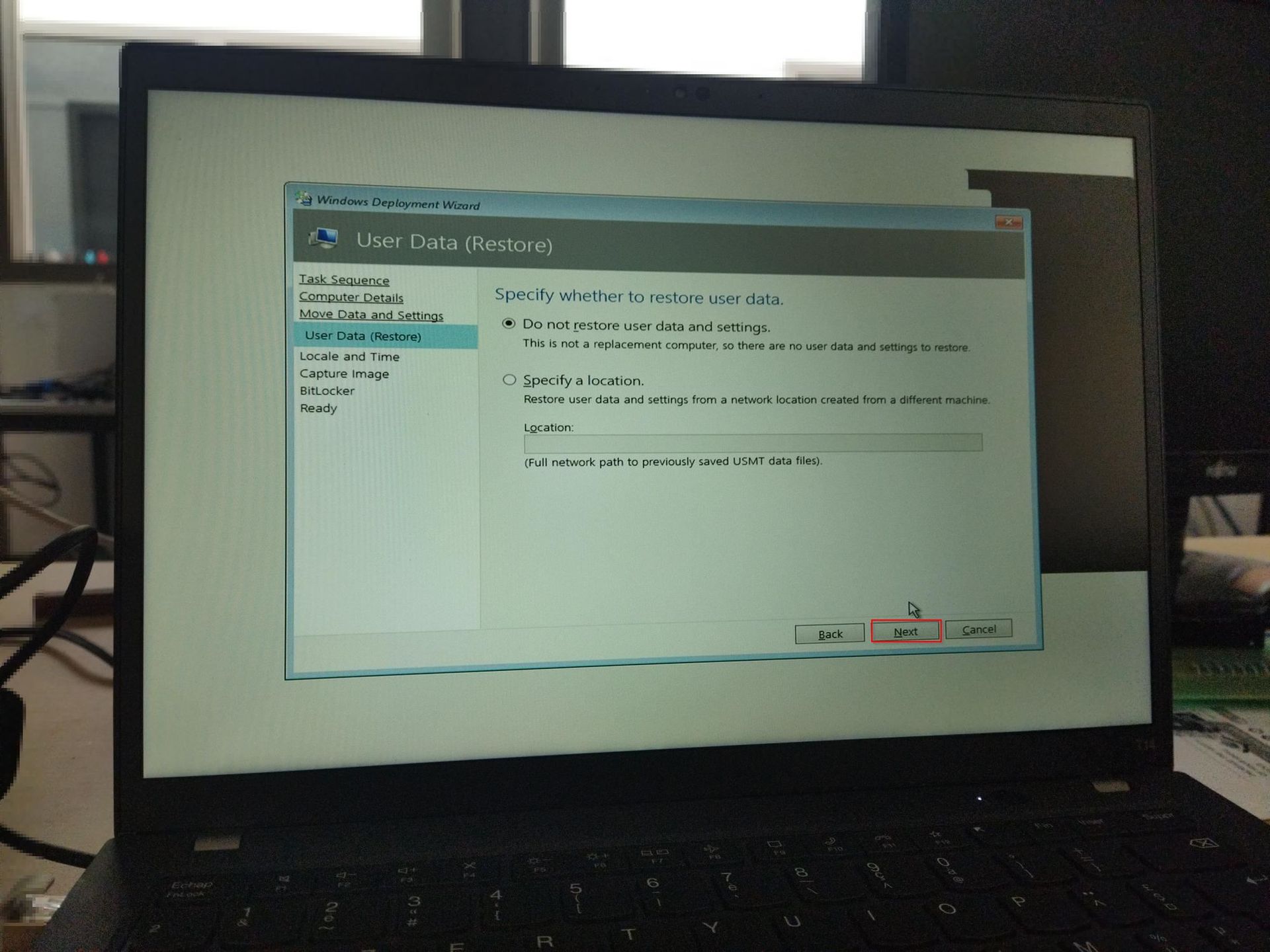
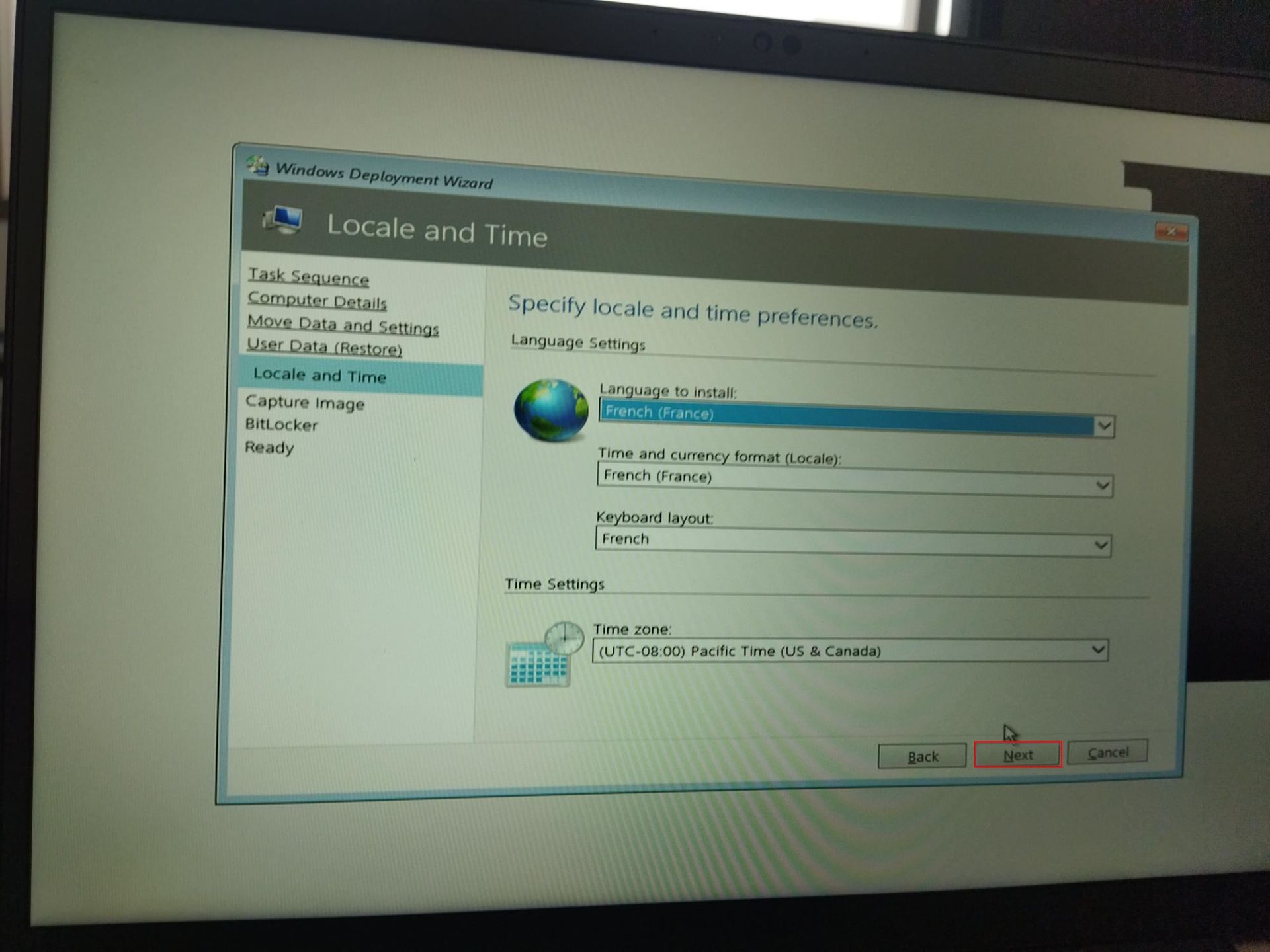
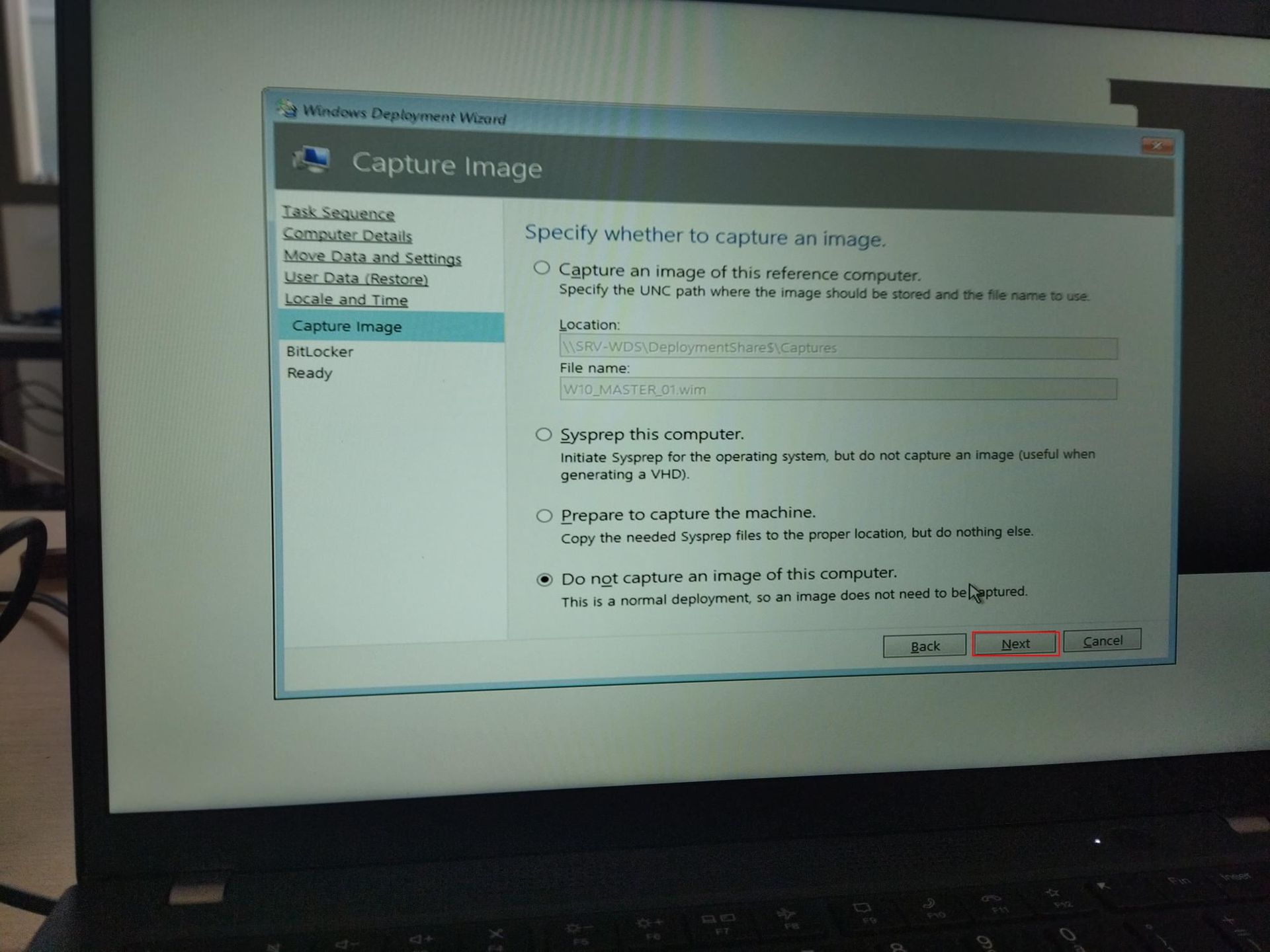
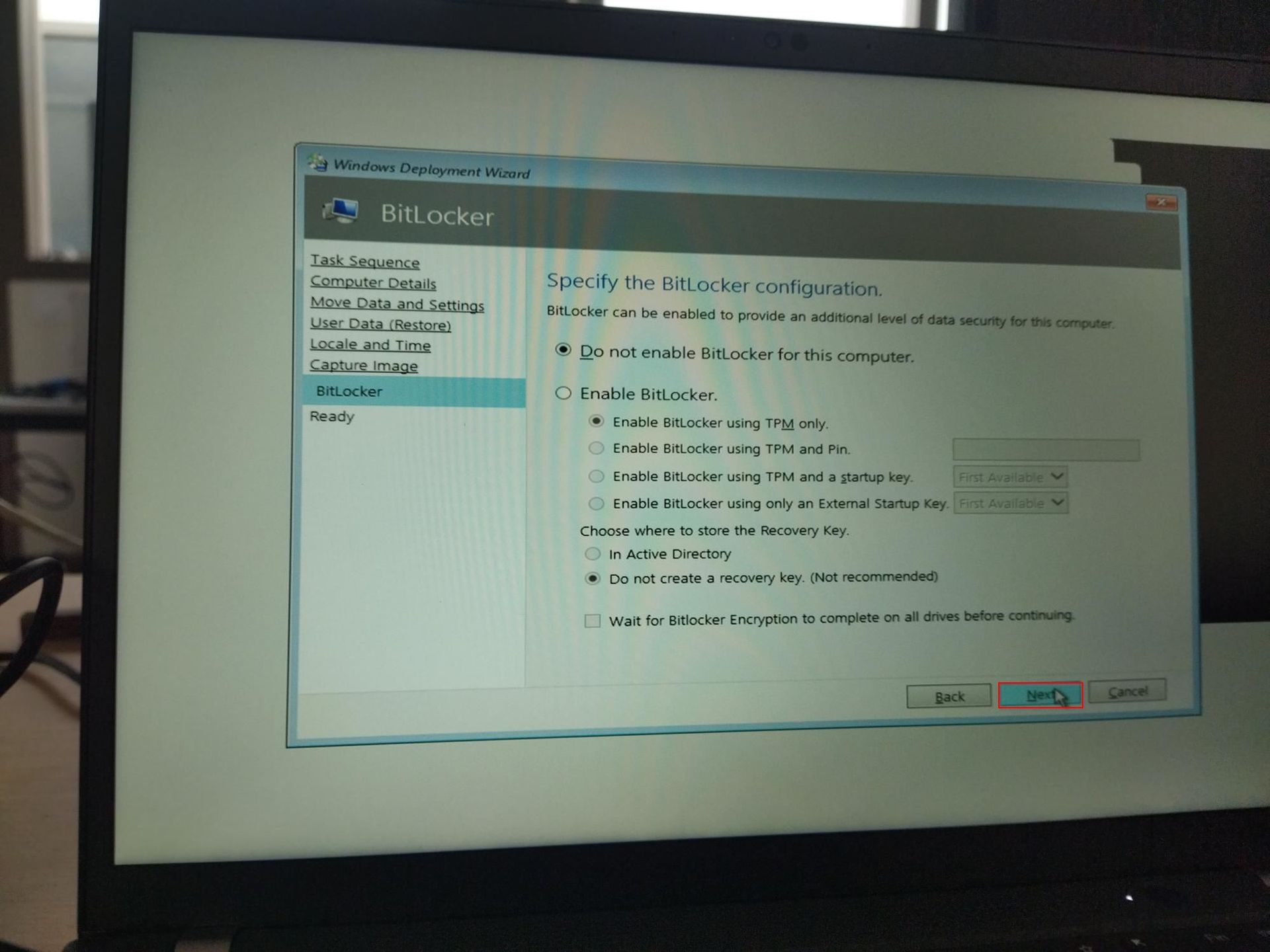
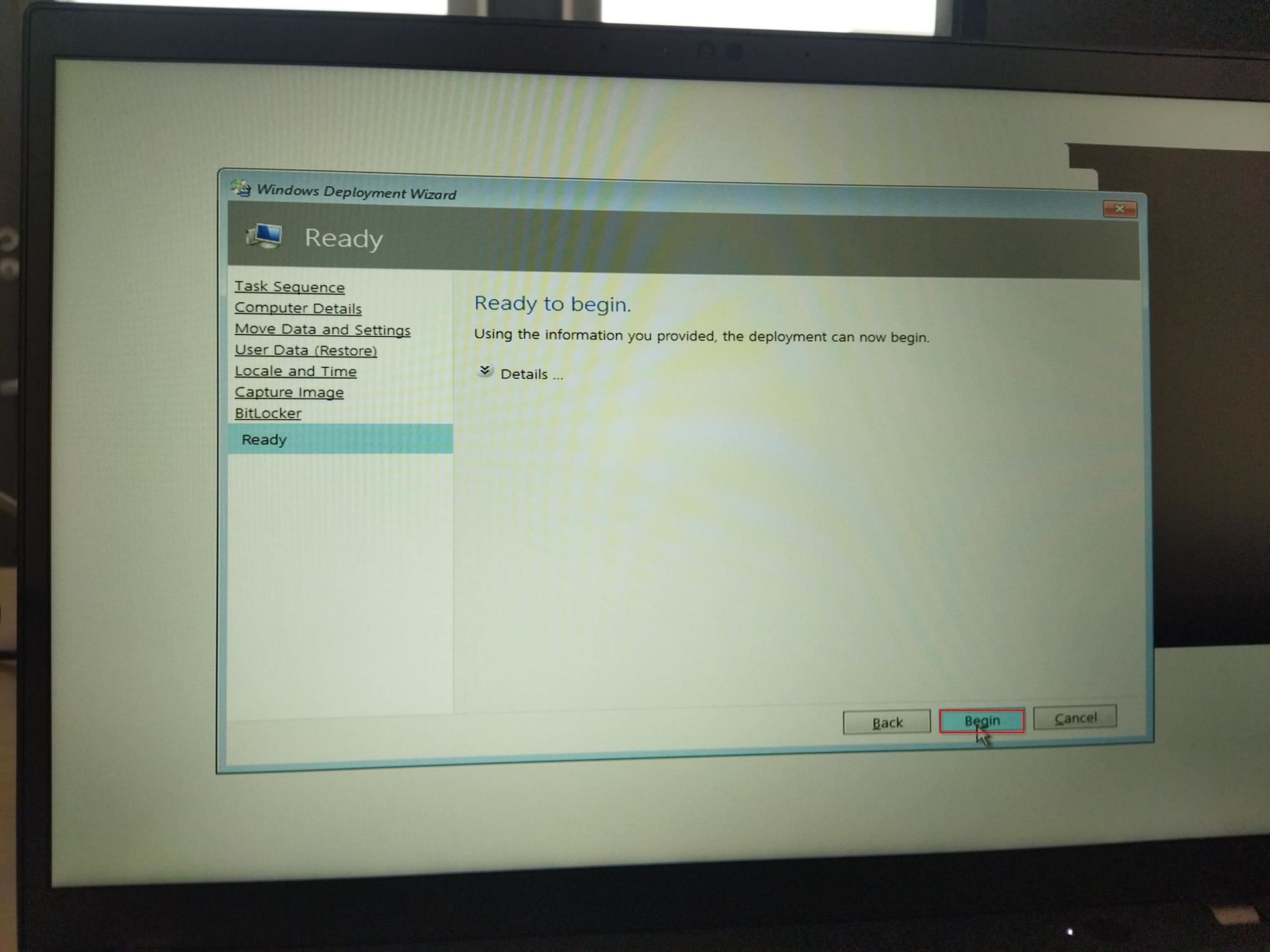
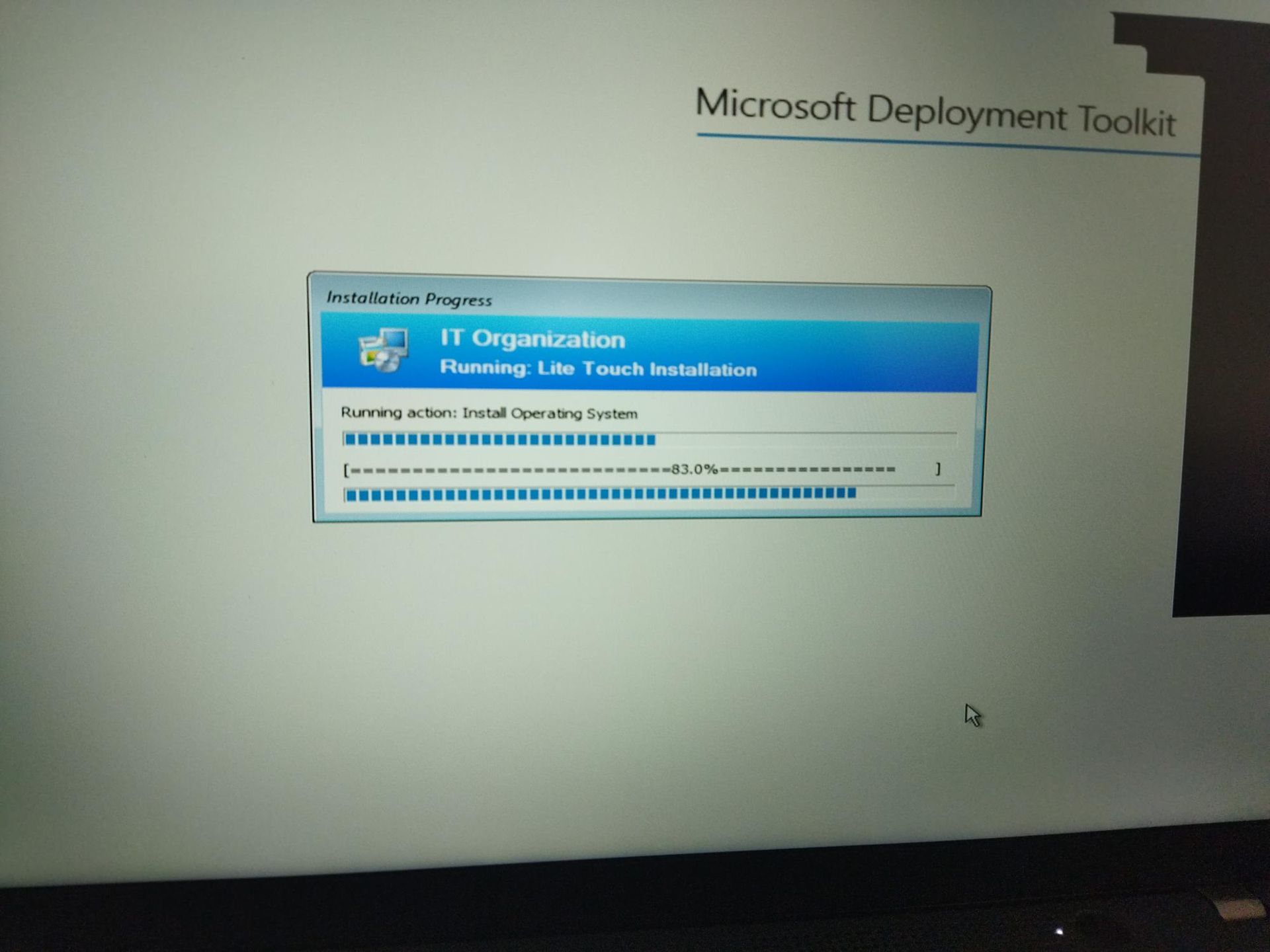
-MDT Microsoft
Lors de mon stage dans l'entreprise APEM j'ai du faire un déploiement de Windows sur plusieurs ordinateur Portable
voici la procédure à suivre :



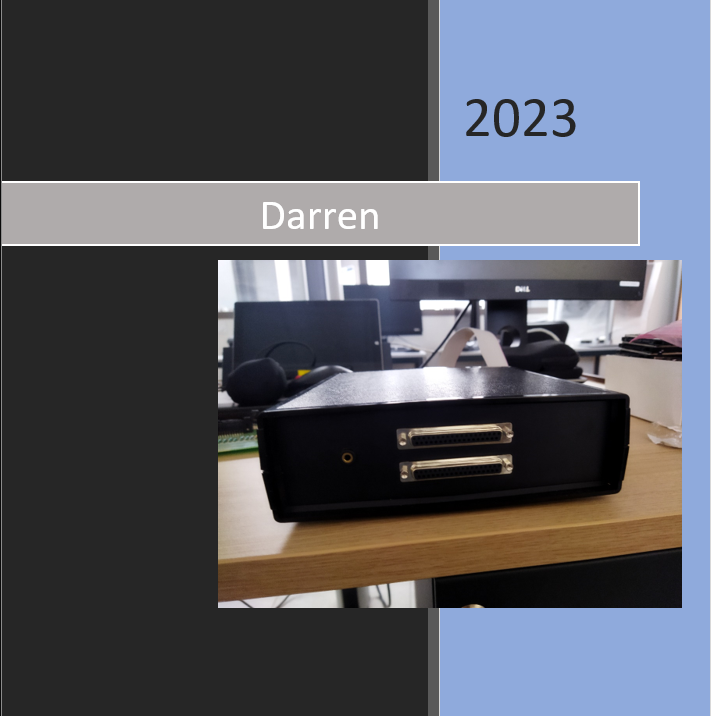
-Darren
Quesque le Darren ?
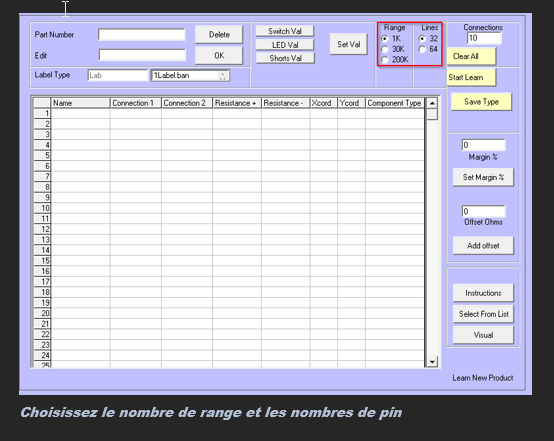
Le Darren est un outil permettant de tester des clavier (tactile).
Il se connecte en USB sur l’ordinateur, et s’exécute par le logiciel.
Il permet de tester différent clavier conçut par Apem, on peut les calibrer pour leurs bons fonctionnements.
Présentation :
Clavier iris


Clavier agilia
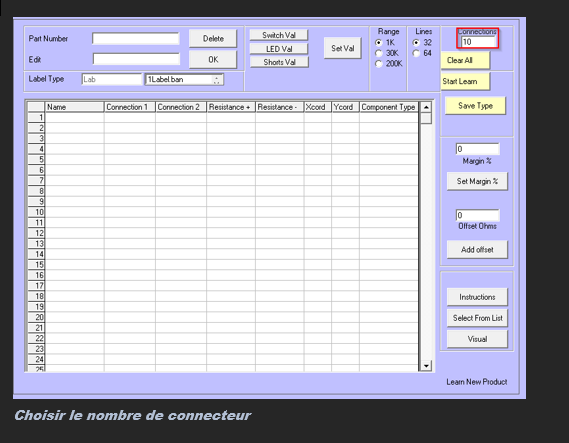
Connecteur
permet de connecter le clavier au Darren


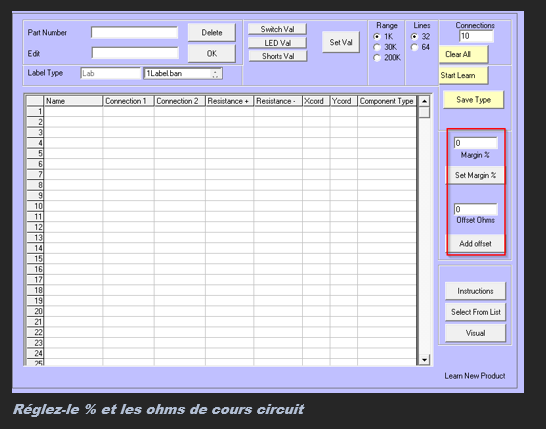
calibreur
permet de calibrée le Darren pour les claviers tactiles





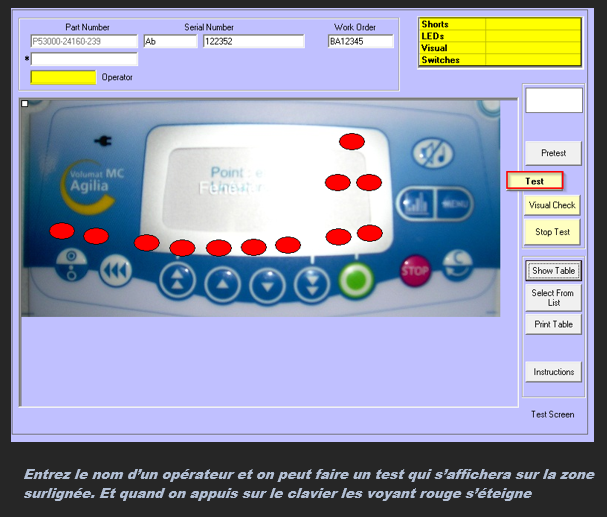
Présentation logiciel



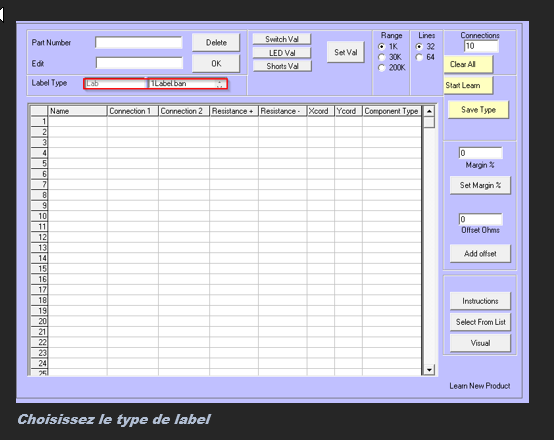
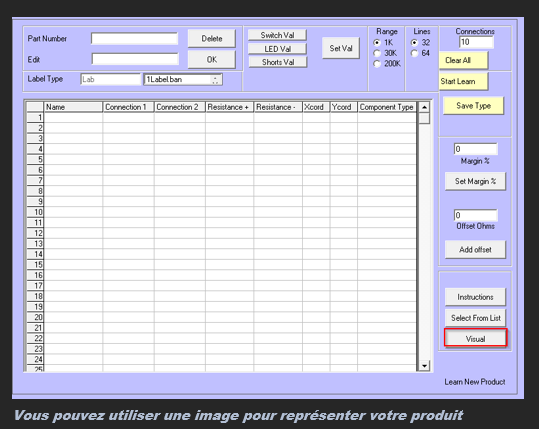
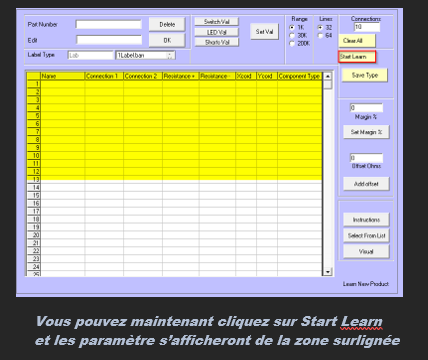
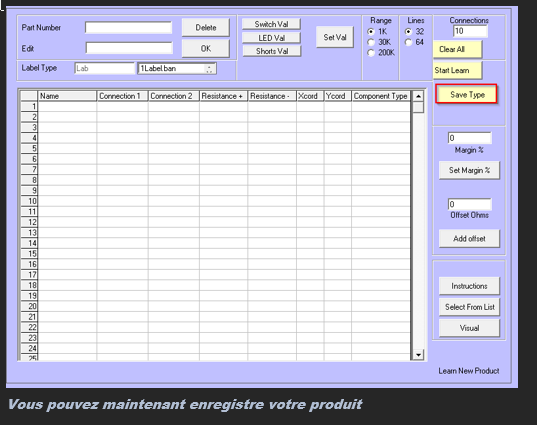
Test logiciel



-Manette vibrante
Avant de tester les vibreurs, j'ai acquis des connaissances en langage C. Ensuite, j'ai appris à contrôler une entrée et une sortie en commençant par des boutons, des LED et des potentiomètres. Par la suite, j'ai exploré ce qu'est l'E2PROM et l'I2C, apprenant à lire et à écrire dans un port, car ces compétences sont utiles pour les vibreurs. Il y a 3 manettes, et chaque manette est équipée d'un vibreur distinct. Cette démarche sera utile aux clients d'APEM pour choisir les vibreurs qu'ils souhaitent. De plus, un deuxième projet est en préparation.
Présentation du logiciel
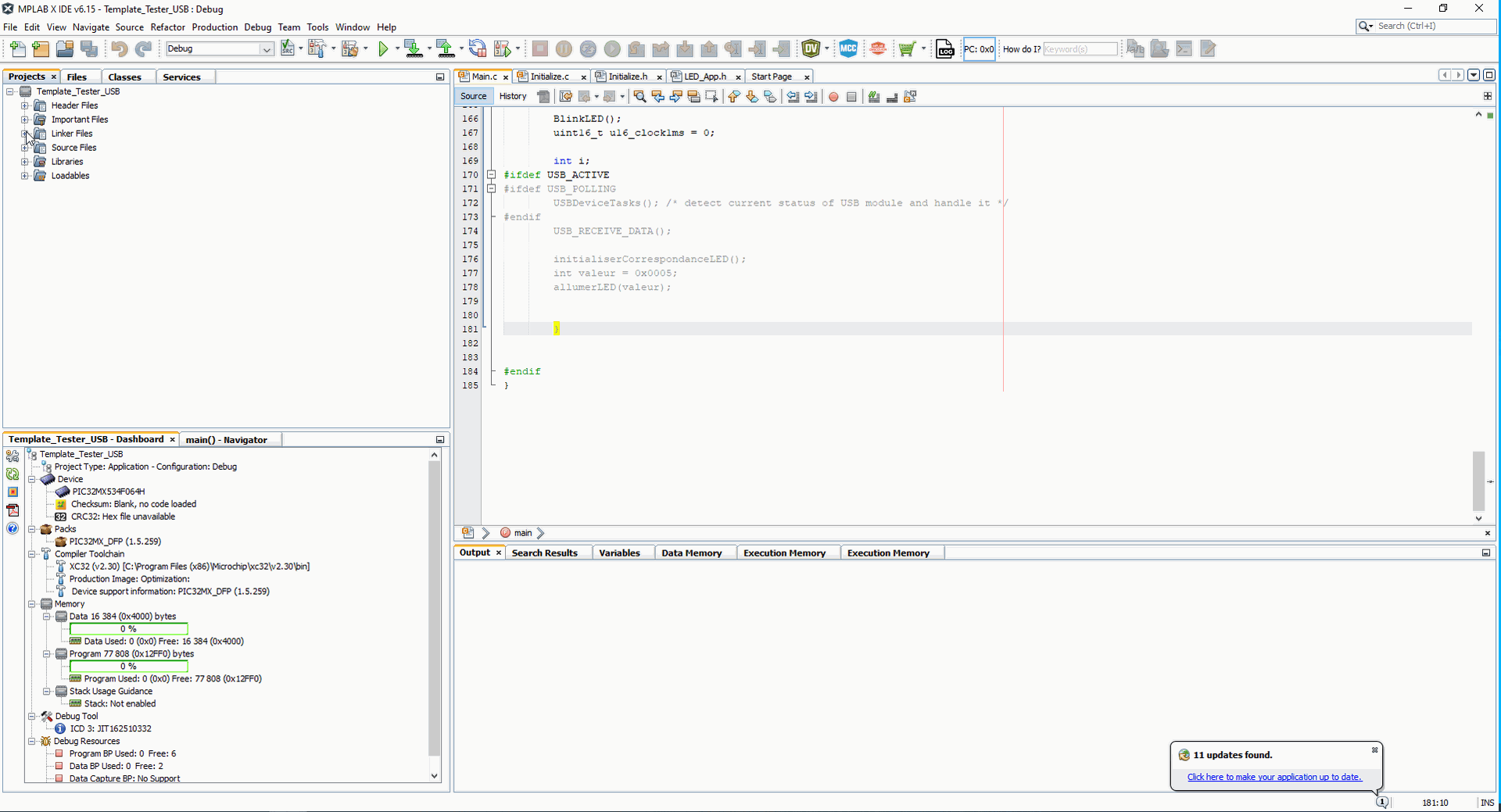
- MPLAB X IDE v6.15 est un environnement de développement intégré (IDE) conçu par Microchip Technology.
- Il est principalement utilisé pour programmer et déboguer des microcontrôleurs et des microprocesseurs de la marque Microchip.
- Cet outil offre une interface conviviale qui permet aux développeurs de créer, éditer, compiler et déboguer leur code pour les microcontrôleurs et microprocesseurs.
- MPLAB X IDE supporte une large gamme de microcontrôleurs et offre des fonctionnalités avancées telles que la visualisation en temps réel des variables, la gestion des projets, et la simulation de circuits.
- Il est largement utilisé dans le domaine de l'électronique et de l'informatique embarquée pour le développement de systèmes embarqués et de dispositifs électroniques.
En résumé, MPLAB X IDE v6.15 est un outil puissant et polyvalent utilisé par les développeurs pour programmer, déboguer et simuler des microcontrôleurs et des microprocesseurs de la marque Microchip.
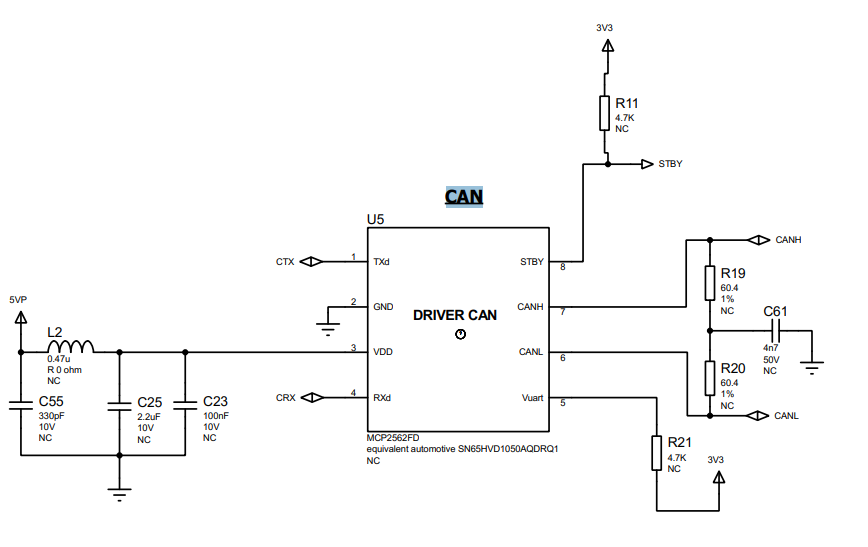
Nous avons une carte CAN
référence : MCP2562FD

Schéma de la Carte CAN

Nous avons des boutons nommé de I01 à IO14, des LEDS nommé de LED1 à LED6 et LED_1P et LED_2P et des potentiomètres nommé de Al1 à Al6
câblage de la carte EE01606/B

Exemple en fonctionnement
Le fonctionnement est le suivant : J1 correspond à l'alimentation (câble noir), puis nous avons une alimentation USB (câble bleu). Le boîtier MPLAB ICD3 est utilisé pour transférer le programme et il est connecté à l'ordinateur en USB.

L'E2PROM / l'I2C
I2C (Inter-Integrated Circuit) et EEPROM (Electrically Erasable Programmable Read-Only Memory) sont deux composants essentiels dans le domaine de l'électronique et de la conception de circuits intégrés. :
I2C** :
Il s'agit d'un bus de communication série qui permet à plusieurs composants électroniques (tels que capteurs, actionneurs, mémoires, etc.) de communiquer entre eux à l'intérieur d'un même système.
L'I2C utilise deux fils pour la transmission de données : un fil de données (SDA) et un fil d'horloge (SCL).
Il est largement utilisé dans les systèmes embarqués, les microcontrôleurs et d'autres applications électroniques pour simplifier la communication entre différents composants.
EEPROM** :
Il s'agit d'un type de mémoire non volatile qui permet de stocker des données de manière permanente, même lorsque l'alimentation est coupée.
Contrairement à la mémoire RAM qui perd les données lorsqu'elle n'est plus alimentée, l'EEPROM conserve les informations même en l'absence d'alimentation électrique.
Les EEPROM sont souvent utilisées pour stocker des paramètres de configuration, des données de calibration, des identifiants uniques, et d'autres informations critiques dans les systèmes électroniques.
En résumé, l'I2C facilite la communication entre différents composants électroniques, tandis que l'EEPROM offre un moyen de stockage permanent pour des données importantes. Ces deux éléments sont essentiels dans la conception de nombreux systèmes électroniques modernes.
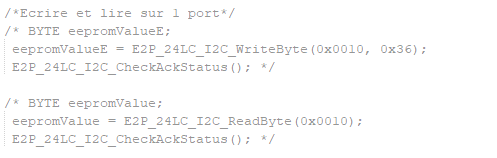
Exemple écriture, lecture d'un port E2PROM
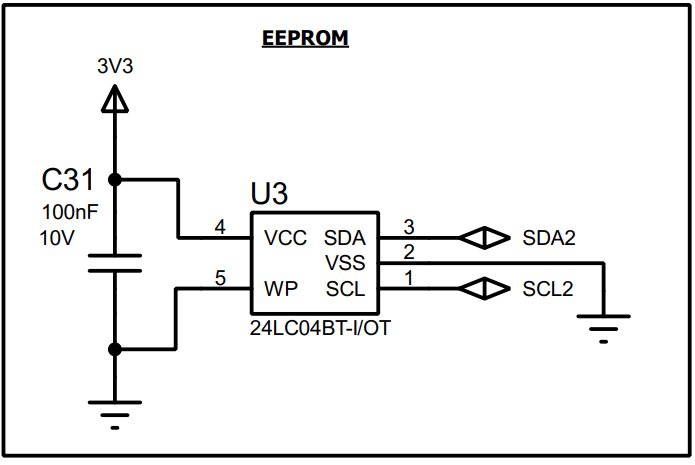
Schema E2PROM
Exemples
voici des des exemple sur les quel je me suis entrainer avant de passer au manette vibrante.
A retenir : PORT pour la lecture et LAT pour l'écriture. Tris entré sortis.
Ce code est destiné à contrôler une LED à l'aide d'un potentiomètre :
- La variable bl_led représente l'état de la LED. Au début, elle est définie comme allumée.
- Ensuite, le code vérifie si un certain temps s'est écoulé. Si c'est le cas, le microcontrôleur lit les canaux ADC (convertisseur analogique-numérique) et met à jour une variable en fonction d'une entrée analogique.
- Ensuite, une autre vérification du temps est effectuée. Si le temps requis s'est écoulé, la LED change d'état, passant de allumée à éteinte, ou vice versa.
- Enfin, le code met à jour l'état de la LED en fonction de la variable bl_led. Si bl_led est vrai, la LED est allumée, sinon elle est éteinte.
BOOL bl_led = TRUE;
if (TIME_OVER(u16_clock100ms, u16_clock1ms)) {u16_clock100ms = u16_clock1ms + TIM_100ms;
ReadADCChannels();
AIByNumber = GetAIByNumber(5);
}
if ((u16_clock1ms - temp_1ms) >= AIByNumber) {temp_1ms = u16_clock1ms;
bl_led = !bl_led;
}
if (bl_led) {LED5_Lat = 1;
} else {LED5_Lat = 0;
}
}
Ce code est un exemple d’un chenillard, qui est une séquence de lumières ou de signaux qui s’allument et s’éteignent en succession.
Le code commence par vérifier si une certaine durée s’est écoulée depuis la dernière mise à jour (c’est-à-dire u16_clock1ms - temp_1ms >= AIByNumber). Si c’est le cas, il met à jour temp_1ms à la valeur actuelle de u16_clock1ms.
Ensuite, il vérifie l’état de IO7_Port. Si IO7_Port est égal à 1, il entre dans une instruction switch qui dépend de la valeur de bl_led. Chaque cas dans l’instruction switch correspond à un état différent du chenillard, où chaque LED est soit allumée (1), soit éteinte (0).
Après avoir exécuté le code correspondant à l’état actuel du chenillard, il incrémente bl_led de 1 et prend le reste de la division par 7, ce qui signifie que bl_led va toujours varier entre 0 et 6.
Si IO7_Port n’est pas égal à 1,le cheniard fonctionne dans l'autre sens.
(u16_clock1ms - temp_1ms) >= AIByNumber) {temp_1ms = u16_clock1ms;
if (IO7_Port == 1) { switch (bl_led) {case 0:
LED5_Lat = 0;
LED4_Lat = 1;
LED3_Lat = 1;
LED2_Lat = 1;
LED1_Lat = 1;
LED_2P_Lat = 0;
LED_1P_Lat = 0;
break;
....
case 6:
LED5_Lat = 1;
LED4_Lat = 1;
LED3_Lat = 1;
LED2_Lat = 1;
LED1_Lat = 1;
LED_2P_Lat = 0;
LED_1P_Lat = 1;
break;
}
bl_led = (bl_led + 1) % 7;
} else { switch (bl_led) {case 0:
LED5_Lat = 1;
LED4_Lat = 1;
LED3_Lat = 1;
LED2_Lat = 1;
LED1_Lat = 1;
LED_2P_Lat = 0;
LED_1P_Lat = 1;
break;
...
case 6:
LED5_Lat = 0;
LED4_Lat = 1;
LED3_Lat = 1;
LED2_Lat = 1;
LED1_Lat = 1;
LED_2P_Lat = 0;
LED_1P_Lat = 0;
break;
}
bl_led = (bl_led + 1) % 7;